个人介绍
1. 自2021年起系统学习并应用C/C++及Qt技术,期间在多个外包平台独立承接软件开发项目,累计拥有4年开发经验,具备扎实的编程基础和丰富的实战能力。熟悉Qt多线程、Windows API、SQL数据库操作、自动化脚本编写、远程控制技术、常规软件开发、游戏图色分析、图像处理(OpenCV)及自动化非标设备软件设计2. 在Qt框架下具备丰富的C/C++开发经验,能够高效完成跨平台图形界面应用与后台逻辑开发,代码结构清晰、可维护性强,保障系统稳定运行。熟悉正规开发流程,包括代码注释、内存管理及压力测试。在工业相机二次开发中注重帧率与图像处理效率,具备将原生OpenGL点云图渲染与Qt框架结合实现可视化的技术能力,并具备良好的性能优化意识3. 独立完成多个项目开发并成功交付客户验收,所有项目均由本人主导从需求分析到代码实现的全流程,具备完整的项目落地能力与良好的交付意识
核心技能
c++
qt
qml
css
opencv
opengl
点云处理
上位机
机械臂
服务器
sql表结构设计
b/s
c/s
图色识别
自动化脚本
安卓app
精选作品集
非接触式工业检测仪
面向精密机械加工、半导体元器件、微型模具、光学零件等工业领域,解决微小物体 / 精密零件的非接触式高精度测量痛点:
实现零件尺寸、角度、弧度、圆形轮廓、切角等几何参数的自动化检测;
满足微米级精度要求,适配高端制造业的质量检测、尺寸校验、成品分选等业务。
1. 海康相机基础控制功能(二次开发核心)
基于海康威视工业相机 SDK 完成全功能二次开发,实现相机硬件的程序化控制,为高精度测量提供稳定、清晰的图像源:
设备管理:自动扫描局域网 / 本地连接的海康相机,支持多相机枚举、连接、断开、状态实时监测;
图像采集与输出:支持实时视频流预览、单帧图像采集、连续帧采集,输出标准格式图像(BMP/JPG/PNG)及原始图像数据,为算法分析提供输入;
异常处理:相机掉线自动重连、采集失败告警、参数配置异常校验,保证系统稳定性。
2. 微米级物体实际尺寸推测功能(核心算法)
系统核心功能,基于自主研发图像算法 + OpenCV 库,实现像素坐标到物理实际尺寸的精准转换,测量误差≤1μm:
高精度标定:通过标准标定板完成相机畸变校正、像素物理当量标定(建立像素与实际微米的换算关系),消除镜头畸变、相机安装角度带来的误差;
亚像素级边缘提取:基于 OpenCV 基础算子优化,自主研发亚像素边缘检测算法,突破普通像素级检测精度限制,精准定位物体轮廓边缘;
实际尺寸计算:自主算法完成物体长度、宽度、厚度等线性尺寸的拟合计算,自动输出物理实际尺寸,核心精度指标:测量误差≤1μm;
3. 几何参数高精度识别功能
基于图像拟合与几何分析算法,完成物体复杂几何特征的高精度识别与数据输出:
角度高精度识别:精准检测物体两条边的夹角,支持锐角、钝角、直角测量,角度误差≤0.01°;
弧度高精度识别:提取弧形轮廓,计算圆弧半径、弧度值、弧长,适配曲面、圆弧类零件检测;
圆形拟合高精度识别:对圆孔、圆柱、圆形工件进行最小二乘 / 椭圆拟合,输出圆心坐标、直径、圆度误差,拟合精度≤1μm;
切角数据识别:识别零件切角、倒角的尺寸、角度、轮廓参数,满足机械零件倒角、切角的标准化检测需求。
4. 辅助功能
图像预处理:基于 OpenCV 实现灰度化、滤波去噪、二值化、形态学处理,优化图像质量,提升算法精度;
数据可视化:实时显示测量尺寸、角度、弧度等数据,叠加绘制检测轮廓、标注参数;
铁路接触网智能巡检系统
(一)核心业务场景
面向铁路局工务段、供电段、轨道交通运维单位,专注解决铁路接触网与轨道巡检核心需求:
替代人工登塔、手工测量,实现接触网导高、拉出值、侧面限界等强制指标的自动化精准检测;
实时采集铁路沿线轨距、承力索、导高线、支柱、接触线几何参数,自动判定设施状态;
生成铁路全线千万级三维点云模型,实现线路数字化存档、可视化复盘、历史数据对比;
推行设备沿轨道移动过程中,完成实时数据采集、实时分析、实时显示、实时存储全流程自动化。
(二)完整功能模块
1. 雷达设备串口协议二次开发(数据采集核心)
针对激光雷达硬件进行深度串口通信二次开发,实现原始检测数据的稳定解析与采集:
串口通信适配:开发自定义串口驱动,适配雷达硬件波特率、数据位、校验位、停止位配置;
协议解析封装:逆向 / 对接雷达私有通信协议,解析原始距离、角度、强度、坐标等核心数据;
数据稳定采集:实现高频率、无丢包、低延时的数据接收,保证高速推行下数据完整性;
异常容错处理:串口掉线重连、数据校验纠错、噪声过滤、异常值剔除,保证采集可靠性。
2. 多源数据融合与坐标拼接(核心算法)
将设备移动距离与雷达点云数据进行三维空间融合,构建完整线路坐标体系:
电机 / 编码器数据采集:实时获取设备推行距离 Z 轴坐标,精准定位设备当前位置;
三维坐标转换:将雷达输出的X/Y 横向 / 纵向距离与 Z 轴位移融合,生成统一三维空间点云;
点云去噪与过滤:自主算法剔除灰尘、杂物、干扰反射点,保留接触网、轨道、支柱有效数据;
坐标精准校准:消除设备震动、偏移带来的误差,保证检测指标精度满足铁路标准。
3. 铁路核心指标自动识别与计算
导高值检测:自动识别接触线与轨面的垂直高度,实时输出精准导高数据;
拉出值检测:自动计算接触线相对轨道中心的水平偏移量,满足铁路运维判定标准;
侧面限界值检测:识别支柱、设备与线路中心的安全距离,超限自动预警;
关键设施识别:自动识别承力索、导高线、接触线、支柱、轨道等铁路核心构件。
4. 高性能三维点云可视化界面
超大数据渲染:支持千万级点云流畅实时显示,无卡顿、无延迟、无崩溃;
实时可视化:设备推行过程中,点云模型边采集、边渲染、边显示;
三维交互操作:支持旋转、缩放、平移、视角切换、点云筛选、构件着色显示;
数据叠加显示:在点云界面实时标注导高值、拉出值、限界值等检测结果。
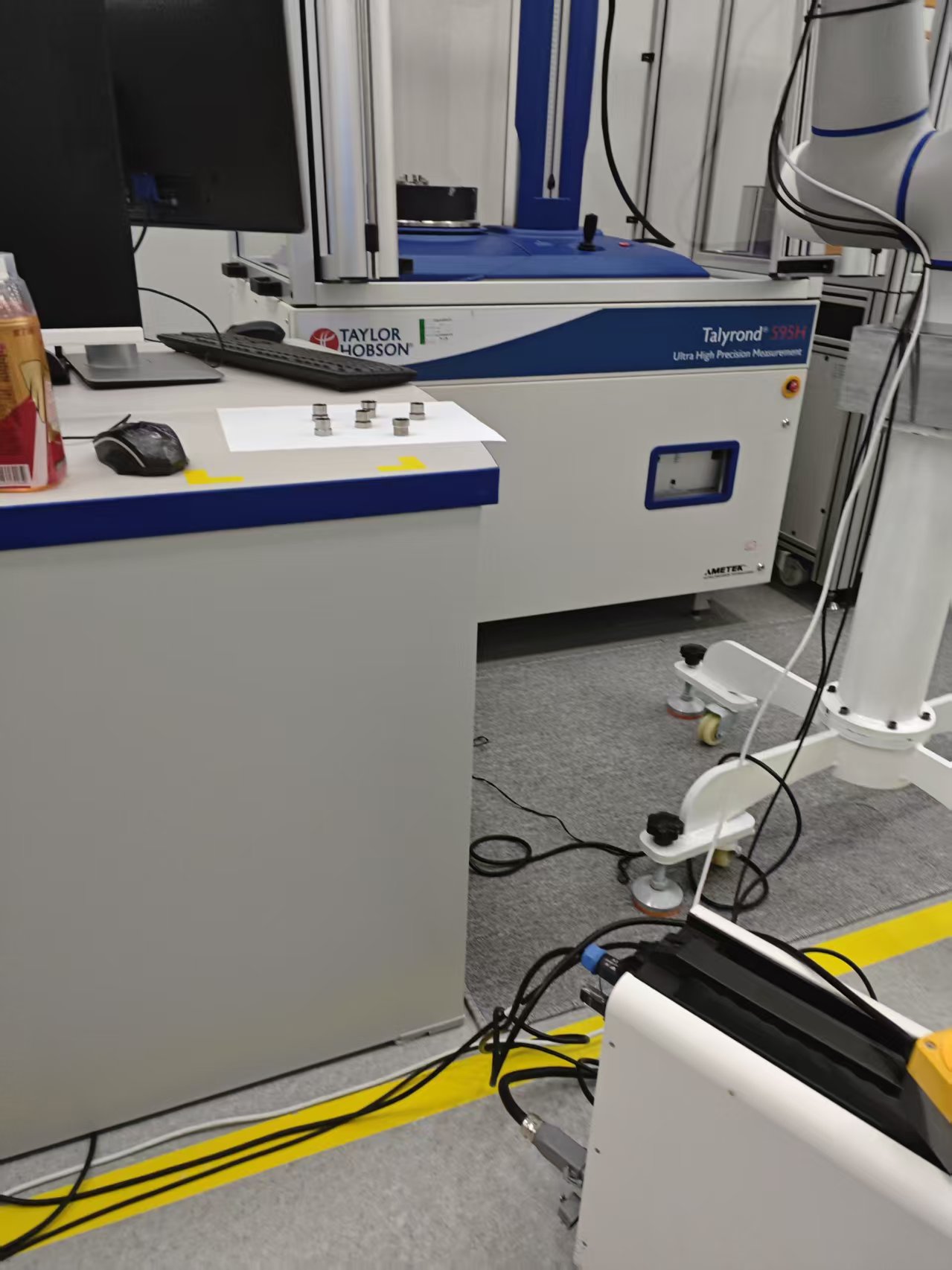
机械臂自动化配合英国泰勒圆度仪
1. 越疆(AuBo)机械臂全功能二次开发
基于越疆机械臂 SDK 完成深度二次开发,实现自动化运动控制与检测执行:
自动轨迹规划:根据检测工位、圆度仪夹具、上料区位置,自主规划安全运动轨迹,支持点到点运动、直线插补、圆弧插补;
自动上下料:机械臂自动抓取待测工件,精准放置到泰勒圆度仪检测平台,检测完成后自动取下工件;
姿态自动调整:根据工件形状自动调整夹持姿态、旋转角度,保证工件与检测探头精准对齐;
安全防护:碰撞检测、异常急停、轨迹容错处理,避免损坏圆度仪与工件;
多任务流程:支持批量工件循环检测、异常工件分拣、连续自动化运行。
2. 海康相机 + VM 视觉手眼标定(眼在手上)
核心定位模块,采用眼在手上(相机安装在机械臂末端) 标定方案,实现超高精度定位:
单张图片快速标定:创新实现单张标定图完成手眼标定,大幅简化标定流程,标定时间缩短 90%;
高精度世界坐标转换:通过 VM 视觉算法识别工件特征,解算三维世界坐标,实时传输给机械臂;
超高定位精度:XY 方向定位误差 **≤1mm**,满足圆度仪精密定位要求;
动态跟随定位:相机随机械臂移动,实时识别工件位置,自动补偿偏移误差。
3. 自研外挂脚本控制软件(核心对接模块)
专为客户检测软件定制开发,实现软件层自动化控制,两种方案无缝对接客户软件:
方案 1:Windows API 虚拟鼠标 / 键盘控制
调用系统底层 API,模拟人工鼠标点击、键盘输入、窗口操作;
自动打开检测软件、启动检测、设置参数、保存数据、导出报告;
无侵入式控制,不修改客户软件,安全稳定。
方案 2:逆向内存基地址修改控制
通过逆向分析客户软件,定位核心功能内存基地址、参数地址;
直接修改软件内存数据、调用核心功能,实现无界面静默自动化操作;
响应速度更快,操作更隐蔽,适配全自动化无人场景。
统一调度功能:自动接收机械臂、视觉信号,按检测流程联动控制,实现全流程闭环。
工作经历
教育背景